SurveillanceMicro-robots emulate water-striding insects
Researchers are working on building nimble micro-robots that are able to skim across the surface of water; the prototype devices emulate water-striding insects such as mosquitoes and water spiders, and could be used for military spy missions, water-pollution monitoring, and other applications
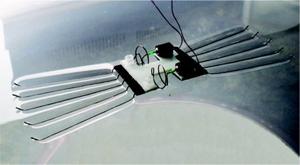
Water-walking micro-robot // Source: freshesnews.ru
Researchers in China are developing nimble small robots capable of skimming across the surface of water.
The prototype devices emulate water-striding insects such as mosquitoes and water spiders, and could be used for military spy missions, water-pollution monitoring, and other applications.
The Engineer reports that researchers from the Harbin Institute of Technology’s School of Chemical Engineering and Technology analyzed water striders’ locomotion to understand how the creatures are able to skim efficiently across the water.
“They found that mainly accounts for the large supporting force is the radius and contact angle of the highly water-repellent (superhydrophobic) legs,” the Engineer reports. “Also, small hairs on the legs of the water strider allow it to form tiny swirling vortices, trapping small pockets of air and enabling them to skirt across water without drowning.”
The scientists describe their research in the journal ACS Applied Materials and Interfaces. The article describes a device that they built that has a leg-span of around 150mm with a body that measures 24mm in diameter; 10 water-repellent wire legs; and two movable, oar-like legs that are propelled by two miniature motors.
“Because the weight of the micro-robot is equal to that of about 390 water striders, one might expect that it would sink quickly when placed on the water surface,” the article notes — but it stands effortlessly on water surfaces and also walks and turns freely.
— Read more in Xinbin Zhang et al., “Bioinspired Aquatic Microrobot Capable of Walking on Water Surface Like a Water Strider,” ACS Applied Materials and Interfaces 3, no. 7 (8 June 2011): 2630–36 (DOI: 10.1021/am200382g)