RoboticsWalking robots a step nearer
Engineers suggests that they have achieved the most realistic robotic implementation of human walking dynamics that has ever been done, which may ultimately allow human-like versatility and performance. The system is based on a concept called “spring-mass” walking that was theorized less than a decade ago, and combines passive dynamics of a mechanical system with computer control. It provides the ability to blindly react to rough terrain, maintain balance, retain an efficiency of motion, and essentially walk like humans do.
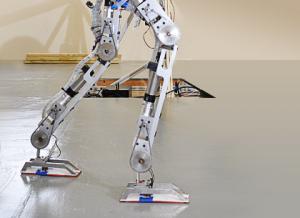
Operational model of walking legs // Source: tamu.edu
A study by engineers at Oregon State University suggests that they have achieved the most realistic robotic implementation of human walking dynamics that has ever been done, which may ultimately allow human-like versatility and performance.
The system is based on a concept called “spring-mass” walking that was theorized less than a decade ago, and combines passive dynamics of a mechanical system with computer control. It provides the ability to blindly react to rough terrain, maintain balance, retain an efficiency of motion, and essentially walk like humans do.
As such, this approach to robots that can walk and run like humans opens the door to entire new industries, jobs and mechanized systems that do not today exist.
The findings on spring-mass walking have been reported for the first time in IEEE Transactions on Robotics, by engineers from OSU and Germany. The work has been supported by the National Science Foundation, the Defense Advanced Research Projects Agency (DARPA), and the Human Frontier Science Program.
OSU reports that the technologies developed at OSU have evolved from intense studies of both human and animal walking and running, to learn how animals achieve a fluidity of motion with a high degree of energy efficiency. Animals combine a sensory input from nerves, vision, muscles and tendons to create locomotion that researchers have now translated into a working robotic system.
The system is also efficient. Studies done with their ATRIAS robot model, which incorporates the spring-mass theory, showed that it’s three times more energy-efficient than any other human-sized bipedal robots.
“I’m confident that this is the future of legged robotic locomotion,” said Jonathan Hurst, an OSU professor of mechanical engineering and director of the Dynamic Robotics Laboratory in the OSU College of Engineering.
“We’ve basically demonstrated the fundamental science of how humans walk,” he said.
“Other robotic approaches may have legs and motion, but don’t really capture the underlying physics,” he said. “We’re convinced this is the approach on which the most successful legged robots will work. It retains the substance and science of legged animal locomotion, and animals demonstrate performance that far exceeds any other approach we’ve seen. This is the way to go.”